








News









































स्थायी चुंबक सिंक्रोनस मोटर के मापदंडों को कैसे पढ़ें?
स्थायी चुंबक सिंक्रोनस मोटर के मापदंडों को कैसे पढ़ें?
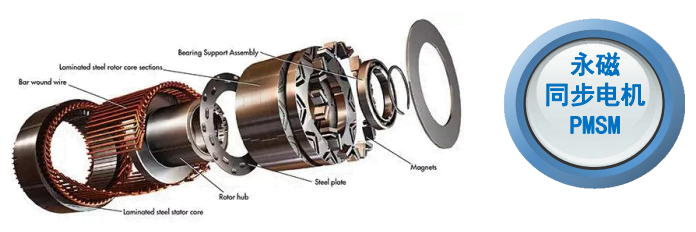
समझनास्थायी चुंबक सिंक्रोनस मोटर के पैरामीटर (PMSM)चयन, अनुप्रयोग, नियंत्रण और दोष निदान का आधार है।
इन मापदंडों को आमतौर पर दो श्रेणियों में विभाजित किया जाता है:
प्लेट पैरामीटर/बुनियादी प्रदर्शन पैरामीटर: ये आमतौर पर मोटर प्लेट पर या उत्पाद मैनुअल के प्रदर्शन विनिर्देश तालिका में सीधे चिह्नित होते हैं, जो आमतौर पर उपयोगकर्ताओं द्वारा सामना किया जाता है।
डिजाइन पैरामीटर/समकक्ष सर्किट पैरामीटर: ये पैरामीटर मोटर के गहन विश्लेषण, सटीक नियंत्रण और सिमुलेशन मॉडलिंग के लिए महत्वपूर्ण हैं। वे आमतौर पर उत्पाद मैनुअल, डिजाइन दस्तावेजों के तकनीकी परिशिष्ट में पाए जाते हैं, या प्राप्त करने के लिए परीक्षण की आवश्यकता होती है
निम्नलिखित इन दो प्रकार के मापदंडों को विस्तार से बताते हैं:
I. नेमप्लेट पैरामीटर / बुनियादी प्रदर्शन पैरामीटर
1। रेटेड पावर:
अर्थ: यांत्रिक शक्ति जो मोटर लगातार, सुरक्षित रूप से और मज़बूती से रेटेड परिस्थितियों (रेटेड वोल्टेज, रेटेड गति, रेटेड लोड, निर्दिष्ट शीतलन की स्थिति, आदि) के तहत आउटपुट कर सकती है। यूनिट आमतौर पर किलोवाट या हॉर्सपावर है।
इस के रूप में देखा गया: यह लोड आवश्यकताओं को पूरा करने के लिए मोटर का चयन करने के लिए मुख्य पैरामीटर है। सुनिश्चित करें कि लोड द्वारा आवश्यक अधिकतम निरंतर शक्ति मोटर की रेटेड पावर से कम या बराबर है। रेटेड पावर और पीक पावर (अल्पकालिक अधिभार क्षमता) के बीच अंतर पर ध्यान दें
2। रेटेड वोल्टेज:
अर्थ: डिजाइन के दौरान निर्दिष्ट लाइन वोल्टेज का प्रभावी मूल्य और मोटर के स्टेटर वाइंडिंग पर लागू किया गया। यूनिट वोल्ट है।
ड्राइवर द्वारा संचालित मोटर के लिए, यह आमतौर पर इन्वर्टर डीसी बस वोल्टेज के बराबर मूल्य को एसी साइड में परिवर्तित करता है।
कैसे देखें: ड्राइवर की आउटपुट वोल्टेज क्षमता से मेल खाना चाहिए। बहुत उच्च वोल्टेज इन्सुलेशन को नुकसान पहुंचाएगा या चुंबकीय संतृप्ति का कारण होगा; बहुत कम वोल्टेज रेटेड पावर और टॉर्क, प्रदर्शन गिरावट का उत्पादन करने में सक्षम नहीं होगा।
3। रेटेड करंट:
अर्थ: बिजली की आपूर्ति से स्टेटर लाइन वर्तमान इनपुट का प्रभावी मूल्य जब मोटर रेटेड पावर, रेटेड गति और रेटेड वोल्टेज को आउटपुट करता है। इकाई एम्पीयर है।
कैसे देखें: इनपुट पावर की गणना करने के लिए उपयोग किया जाता है, ड्राइवर वर्तमान क्षमता का चयन करें (ड्राइवर की रेटेड करंट मोटर के रेटेड करंट से अधिक होना चाहिए), पावर सप्लाई लाइन और ओवरलोड प्रोटेक्शन डिवाइस को डिज़ाइन करें। यह अप्रत्यक्ष रूप से तांबे के नुकसान के आकार को भी दर्शाता है।
मूल्याँकन की गति:
अर्थ: रेटेड वोल्टेज, रेटेड आवृत्ति और रेटेड आउटपुट पावर में मोटर की रोटर रोटेशन गति। यूनिट प्रति मिनट क्रांतियों है।
इसे लोड की गति आवश्यकताओं से मेल खाने की आवश्यकता है। कैसे समझें कि मोटर निरंतर गति से चल रही है या नहीं: इसे गति पर चलाने के लिए समायोजित करने की आवश्यकता है। रेटेड गति और अधिकतम गति (यांत्रिक शक्ति और कमजोर चुंबकीय क्षमता द्वारा सीमित) के बीच अंतर पर ध्यान दें
5। रेटेड आवृत्ति:
अर्थ: बिजली की आपूर्ति की आवृत्ति जब मोटर सीधे एक साइनसोइडल बिजली की आपूर्ति (जैसे, ग्रिड) द्वारा संचालित होती है। एक आवृत्ति कनवर्टर द्वारा संचालित मोटर्स के लिए, यह पैरामीटर आमतौर पर रेटेड गति पर ड्राइवर की आउटपुट आवृत्ति को संदर्भित करता है।
कैसे देखें: बिजली आवृत्ति अनुप्रयोगों के लिए, इसे ग्रिड आवृत्ति (50Hz या 60Hz) से मेल खाना चाहिए। चर आवृत्ति अनुप्रयोगों के लिए, यह पैरामीटर सीधे रेटेड गति (n = 60f /p, जहां p ध्रुवों की संख्या है) से संबंधित है।
6। रेटेड टॉर्क:
मोटर द्वारा उत्पन्न यांत्रिक टोक़ जब यह रेटेड गति पर रेटेड शक्ति को आउटपुट करता है। यूनिट: एन · एम।
सूत्र है: t = p/w, जहां p रेटेड पावर (वाट) है और w रेटेड कोणीय वेग (रेडियन/सेकंड, डब्ल्यू = 2πn/60, एन आरपीएम में रेटेड गति है) है। यह लोड के शून्य प्रतिरोध टोक़ को दूर करने के लिए आवश्यक मुख्य पैरामीटर है। रेटेड टॉर्क और पीक टॉर्क (अल्पकालिक अधिभार क्षमता) के बीच अंतर पर ध्यान दें।
7। दक्षता:
मोटर की रेटेड दक्षता को इलेक्ट्रिकल पावर (पिन =, 3 * वी रेटेड, जहां वी तीन-चरण प्रणालियों के लिए रेटेड वोल्टेज है) के लिए आउटपुट मैकेनिकल पावर के प्रतिशत अनुपात के रूप में परिभाषित किया गया है। सूत्र n = (p_out / p_in) × 100% विद्युत ऊर्जा को यांत्रिक शक्ति में बदलने की अपनी क्षमता को इंगित करता है। उच्च दक्षता परिचालन लागत को कम करते हुए ऊर्जा के नुकसान (तांबे के नुकसान, लोहे की हानि, यांत्रिक हानि और रिसाव के नुकसान सहित) को कम करती है। ध्यान दें कि मोटर नेमप्लेट पर प्रदर्शित दक्षता आमतौर पर केवल रेटेड स्थिति को दर्शाती है।
8। पावर फैक्टर:
अर्थ: रेटेड कामकाजी परिस्थितियों में इनपुट सक्रिय शक्ति (COS) को स्पष्ट शक्ति (COS) का अनुपात। यह वर्तमान और वोल्टेज तरंग और वर्तमान विरूपण की डिग्री के बीच चरण संबंध को दर्शाता है।
इसे कैसे देखें: एक उच्च शक्ति कारक का अर्थ है ग्रिड की उच्च उपयोग दर और ग्रिड के लिए कम "प्रदूषण"। पीएमएसएम में आमतौर पर रेटेड शर्तों के तहत एक उच्च शक्ति कारक (1 के करीब) होता है। ड्राइवर (इन्वर्टर) भी इनपुट पक्ष पर पावर फैक्टर को भी प्रभावित करता है।
9। आवृत्ति:
अर्थ: मोटर के चुंबकीय क्षेत्र के चुंबकीय ध्रुवों की कुल संख्या (एन और एस पोल जोड़े में दिखाई देती है)। डंडे की संख्या आमतौर पर नेमप्लेट पर इंगित की जाती है।
देखना: मोटर की सिंक्रोनस गति और बिजली की आपूर्ति आवृत्ति (एन सिंक = 60F/पी) के बीच संबंध निर्धारित करता है। अधिक ध्रुवों के परिणामस्वरूप कम तुल्यकालिक गति होती है लेकिन संभावित रूप से उच्च टोक़ घनत्व। नियंत्रण एल्गोरिदम को प्रभावित करने वाले पैरामीटर (जैसे, पर्यवेक्षक बैंडविड्थ)
10। इन्सुलेशन क्लास:
अर्थ: मोटर घुमावदार की इन्सुलेशन सामग्री का अधिकतम परिचालन तापमान निर्दिष्ट किया गया है। सामान्य ग्रेड बी (130 डिग्री सेल्सियस), एफ (155 डिग्री सेल्सियस), एच (180 डिग्री सेल्सियस) हैं।
कैसे देखें: मोटर की स्वीकार्य तापमान वृद्धि और अधिभार क्षमता निर्धारित करता है। उच्च तापमान वातावरण या उच्च अधिभार की आवश्यकता वाले अनुप्रयोगों में, उच्च इन्सुलेशन ग्रेड (जैसे एफ या एच) के साथ मोटर चुनने के लिए यह सुरक्षित और अधिक विश्वसनीय है।
11। संरक्षण वर्ग:
अर्थ: आईपी कोड मोटर हाउसिंग की ठोस विदेशी पदार्थ (पहले अंक) और तरल (दूसरे अंक) को प्रवेश करने से रोकने की क्षमता को इंगित करता है। उदाहरण के लिए, IP54 (डस्टप्रूफ और वाटरप्रूफ), IP65 (डस्टप्रूफ और वॉटर-रेसिस्टेंट), IP67 (डस्टप्रूफ और शॉर्ट-टर्म विसर्जन प्रतिरोधी)।
कैसे देखें: मोटर स्थापना वातावरण की धूल, आर्द्रता और नमी की स्थिति के अनुसार चयन करें। आउटडोर, आर्द्र और धूल भरे वातावरण को उच्च सुरक्षा वर्ग (जैसे IP65 या उच्चतर) की आवश्यकता होती है
12। कूलिंग मोड:
अर्थ: मोटर हीट अपव्यय का तरीका। आम लोग I0 411 (सेल्फ फैन कूलिंग, सर्फेस हीट डिसिपेशन), I0 416 (मजबूर हवा कूलिंग, बाहरी प्रशंसक), I0 410 (प्राकृतिक कूलिंग, कोई प्रशंसक नहीं), IC71W (पानी कूलिंग) हैं।
कैसे देखें: यह मोटर की बिजली घनत्व और निरंतर संचालन क्षमता को प्रभावित करता है। उच्च शक्ति या कॉम्पैक्ट मोटर्स को अक्सर हवा ठंडा या पानी ठंडा करने के लिए मजबूर किया जाता है
Ii। डिजाइन पैरामीटर/समकक्ष सर्किट पैरामीटर
इन मापदंडों का उपयोग आमतौर पर वेक्टर नियंत्रण, सिमुलेशन, दक्षता अनुकूलन और प्रदर्शन की भविष्यवाणी के लिए मोटर (DQ एक्सिस मॉडल) के गणितीय मॉडल को स्थापित करने के लिए किया जाता है।
1। स्टेटर प्रतिरोध:
अर्थ: डीसी या कम आवृत्ति के तहत स्टेटर वाइंडिंग के प्रत्येक चरण का प्रतिरोध मूल्य। यूनिट ओम है। आमतौर पर चरण प्रतिरोध को संदर्भित करता है।
इसे कैसे देखें: यह तांबे के नुकसान की गणना, वर्तमान लूप नियंत्रण मापदंडों की सेटिंग और तापमान में वृद्धि के अनुमान को प्रभावित करता है। यह तापमान से काफी प्रभावित होता है (तापमान के साथ बढ़ता)
2.D- अक्ष इंडक्शन / क्यू-एक्सिस इंडक्शन:
अर्थ: स्टेटर इंडक्शन पैरामीटर रोटर रोटेटिंग कोऑर्डिनेट सिस्टम (डी-एक्सिस और क्यू-एक्सिस) में परिभाषित किया गया। डी-अक्ष स्थायी चुंबक के चुंबकीय क्षेत्र की दिशा के साथ है, और क्यू-अक्ष ए-एक्सिस से आगे 90 डिग्री इलेक्ट्रिक कोण है।
एलडी: डी-एक्सिस इंडक्शन। स्थायी मैग्नेट की उपस्थिति के कारण, डी-एक्सिस चुंबकीय सर्किट की चुंबकीय अनिच्छा बड़ी है, और एलडी आमतौर पर छोटा या नकारात्मक भी होता है (एम्बेडेड पीएमएसएम के लिए)
क्यू-एक्सिस इंडक्शन। क्यू-एक्सिस चुंबकीय सर्किट मुख्य रूप से स्टेटर और रोटर कोर से गुजरता है, कम चुंबकीय प्रतिरोध के साथ, और एलक्यू आमतौर पर बड़ा होता है। ला:
मुख्य पैरामीटर निर्धारित करते हैं: विद्युत चुम्बकीय टोक़: t = (3/2) × p [± × × LQ + (LD-LQ) × LD × LQ] (जहां ± ± स्थायी चुंबक फ्लक्स लिंकेज का प्रतिनिधित्व करता है)। पीएमएसएम का मौलिक सिद्धांत अनिच्छा टोक़ को एलडी = एलक्यू में निहित है (उच्च नमकीन ध्रुव अनुपात के साथ आईपीएमएसएम के लिए)। कमजोर चुंबकीय क्षमता: छोटे एलडी मान आमतौर पर व्यापक कमजोर चुंबक ऑपरेशन रेंज और बेहतर उच्च गति प्रदर्शन को सक्षम करते हैं। वर्तमान लूप बैंडविड्थ और कंट्रोलर डिज़ाइन: इंडक्शन वर्तमान लूप के पहले-क्रम जड़ता घटक में प्राथमिक समय स्थिरता का गठन करता है। विद्युत चुम्बकीय बैक ईएमएफ तरंग और आयाम चुंबकीय संतृप्ति स्तर (विशेष रूप से उच्च धाराओं पर) से काफी प्रभावित होते हैं।
3। स्थायी चुंबक प्रवाह:
अर्थ: स्टेटर वाइंडिंग में स्थायी चुंबक द्वारा उत्पन्न चुंबकीय लिंक का आयाम। यूनिट वेबर है। आमतौर पर स्टेटर वाइंडिंग में रोटर स्थायी चुंबक क्षेत्र द्वारा प्रेरित अधिकतम चुंबकीय लिंक को संदर्भित करता है।
कैसे देखें: कोर पैरामीटर! यह निर्धारित करता है:
वापस EMF स्थिरांक: ke = ψpm * w (जहां w विद्युत क्षेत्र का कोणीय वेग है)। बैक ईएमएफ घूर्णी गति के लिए आनुपातिक है।
टॉर्क कॉन्स्टेंट: kt ((3/2) * p * ± ± (सतह-माउंटेड SPMSM, ld) LQ के लिए)। टॉर्क क्यू-एक्सिस करंट के लिए आनुपातिक है।
आधार गति: अधिकतम गति जो मोटर रेटेड वोल्टेज पर प्राप्त कर सकती है (जब बैक ईएमएफ बस वोल्टेज के करीब है)
कमजोर चुंबकीय नियंत्रण का शुरुआती बिंदु।
4। वापस ईएमएफ स्थिर:
परिभाषा: एक मोटर द्वारा प्रति क्रांति उत्पन्न होने वाली पीठ ईएमएफ (आमतौर पर लाइन बैक ईएमएफ का उल्लेख) की परिमाण। इकाइयां v/(krpm) या VS/° हैं। मापन विधि: सीधे स्थायी चुंबक फ्लक्स लिंकेज ψpm (ke = ×पीएम × डब्ल्यू) से संबंधित है। किसी भी घूर्णी गति (ई = के × एन) पर ईएमएफ का अनुमान लगाने के लिए उपयोग किया जाता है, जो ड्राइव द्वारा आवश्यक न्यूनतम बस वोल्टेज का निर्धारण करने, ओवरमॉड्यूलेशन को रोकने और कमजोर चुंबक नियंत्रण को लागू करने के लिए महत्वपूर्ण है। नो-लोड बैक-ड्राइव परीक्षण के माध्यम से औसत दर्जे का।
5। टोक़ निरंतर:
अर्थ: मोटर प्रति यूनिट करंट (SPMSM के लिए, लगभग kt) (3/2)*p*ψpm) द्वारा उत्पन्न टोक़ का परिमाण। यूनिट एनएम/ए है।
संदर्भ: किसी दिए गए टॉर्क कमांड (LQ_REF = T_REF / KT) के लिए आवश्यक Q- अक्ष वर्तमान कमांड का अनुमान लगाने के लिए उपयोग किया जाता है। ध्यान दें कि IPMSM के लिए, KT मैग्नेटोरेसिस्टेंस टॉर्क के अस्तित्व के कारण स्थिर नहीं है और आईडी के साथ भिन्न होता है।
6। विद्युत समय स्थिर:
अर्थ: आमतौर पर वर्तमान लूप के विद्युत समय स्थिरांक को संदर्भित करता है, t_e = l / r (l को आमतौर पर LQ या औसत के रूप में लिया जाता है, R चरण प्रतिरोध है)
कैसे देखें: यह डिजाइन करंट लूप कंट्रोलर (आमतौर पर पीआई नियामक) का एक प्रमुख पैरामीटर है, जो वर्तमान लूप की प्रतिक्रिया गति को निर्धारित करता है।
7। यांत्रिक समय स्थिर:
अर्थ: मोटर और लोड जड़ता, घर्षण और अन्य कारकों के समय निरंतरता को देखते हुए, tm = j *r/(kt *ke) (j कुल जड़ता है)
कैसे देखें: स्पीड रिंग कंट्रोलर के डिजाइन के लिए स्पीड रिंग की प्रतिक्रिया गति एक महत्वपूर्ण संदर्भ है
8. जड़ता का क्षण :
अर्थ: मोटर रोटर की जड़ता का क्षण ही। यूनिट Kg · m है? कैसे पढ़ें: यह मोटर के त्वरण/मंदी की क्षमता, गति लूप की गतिशील प्रतिक्रिया और गड़बड़ी को लोड करने के लिए संवेदनशीलता को प्रभावित करता है। सर्वो प्रणाली को जड़ता के क्षण से मेल खाने के लिए आवश्यकताएं हैं।
9। अधिकतम वर्तमान:
अर्थ: मोटर या ड्राइवर द्वारा अनुमत अधिकतम अल्पकालिक वर्तमान (पीक करंट)। आमतौर पर रेटेड करंट की तुलना में बहुत अधिक।
कैसे देखें: मोटर की अल्पकालिक अधिभार क्षमता (पीक टॉर्क) निर्धारित करता है। यह घुमावदार हीटिंग, स्थायी चुंबक डेमैग्नेटाइजेशन जोखिम और ड्राइवर वर्तमान सीमा जैसे कारकों द्वारा प्रतिबंधित है।
10। रोटेशन जड़ता :
अर्थ: मोटर रोटर की जड़ता का क्षण ही। यूनिट Kg · m है?
इसे कैसे देखें: यह मोटर के त्वरण/मंदी की क्षमता, गति की अंगूठी की गतिशील प्रतिक्रिया और गड़बड़ी को लोड करने की संवेदनशीलता को प्रभावित करता है। सर्वो प्रणाली में घूर्णी जड़ता के मिलान के लिए आवश्यकताएं हैं।
11। अधिकतम गति:
अर्थ: अधिकतम गति जो एफ मोटर यांत्रिक शक्ति, असर जीवन, कंपन और शोर की आवश्यकताओं के तहत पहुंच सकती है। आमतौर पर रेटेड गति से बहुत अधिक है।
कैसे देखें: मोटर की ऑपरेटिंग स्पीड रेंज निर्धारित करता है। उच्चतम गति पर, टोक़ उत्पादन को बनाए रखने के लिए आमतौर पर कमजोर चुंबकीय नियंत्रण की आवश्यकता होती है।
आप इन मापदंडों को कैसे देखते हैं
1। स्पष्ट उद्देश्य:
चयन और मिलान: नेमप्लेट (पावर, वोल्टेज, स्पीड, टॉर्क, प्रोटेक्शन, कूलिंग) के मापदंडों पर ध्यान केंद्रित करें ताकि यह सुनिश्चित किया जा सके कि लोड आवश्यकताओं, पर्यावरणीय स्थिति और बिजली की आपूर्ति आवश्यकताओं को पूरा किया गया है। दक्षता पर ध्यान दें (दीर्घकालिक परिचालन लागत)
ड्राइव कॉन्फ़िगरेशन और नियंत्रण: नेमप्लेट मापदंडों के अलावा, डिजाइन पैरामीटर (आर, एलडी, एलक्यू,, पीएम) को उच्च-प्रदर्शन वेक्टर नियंत्रण (जैसे, एफ 0 सी) प्राप्त करने के लिए आधार के रूप में प्राप्त किया जाना चाहिए। कंट्रोलर पैरामीटर (पीआई गेन, या के/केटी) और ऑब्जर्वर मापदंडों को इन मापदंडों के अनुसार सेट करने की आवश्यकता है।
प्रदर्शन विश्लेषण और सिमुलेशन: एक सटीक गणितीय मॉडल स्थापित करने के लिए समतुल्य सर्किट मापदंडों (आर, एलडी, एलक्यू, एलक्यू, ypm, वाई, घर्षण गुणांक, आदि) का एक पूरा सेट आवश्यक है।
फॉल्ट डायग्नोसिस: पैरामीटर परिवर्तन (जैसे कि बढ़े हुए प्रतिरोध घुमावदार के ओवरहीटिंग को इंगित कर सकते हैं, और इंडक्शन में परिवर्तन इंटर-टर्न शॉर्ट सर्किट या डेमैग्नेटाइजेशन को इंगित कर सकता है) का उपयोग नैदानिक आधार के रूप में किया जा सकता है।
2। मापदंडों के बीच संबंध पर ध्यान दें:
शक्ति, गति, टोक़: पी = टी*डब्ल्यू
वोल्टेज, बैक ईएमएफ, करंट, इंडक्शन: वी of ई + आईआर + जवली (वेक्टर रिलेशनशिप)
टोक़, चुंबकीय प्रवाह, वर्तमान: t = (3/2)* p* [± ±* lq + (ld-lq)* ld* lq] गति, आवृत्ति, पोल लॉगरिदम: n_sync = 60f/p वापस इलेक्ट्रोमोटिव बल स्थिर और चुंबकीय प्रवाह: ke∝ ψ ± ± ±
3। मापदंडों की सशर्त प्रकृति को समझना:
कई पैरामीटर (विशेष रूप से डिजाइन पैरामीटर आर, एलडी, और एलक्यू) स्थिरांक नहीं हैं - वे तापमान, वर्तमान (चुंबकीय संतृप्ति), और रोटर स्थिति (दांत नाली प्रभाव) के साथ भिन्न होते हैं। उच्च-प्रदर्शन नियंत्रण को इन nonlinear कारकों के लिए जिम्मेदार होना चाहिए। उपकरणों के नामप्लेटों पर विशिष्टताओं को विशिष्ट परिस्थितियों (रेटेड वोल्टेज, आवृत्ति, लोड, कूलिंग और तापमान) के तहत परिभाषित किया गया है। जब वास्तविक परिचालन की स्थिति इन आदर्श परिदृश्यों से भिन्न होती है, तो प्रदर्शन रेटेड बिंदु से विचलित हो सकता है।
4। आधिकारिक दस्तावेज देखें:
मोटर विनिर्देशों को उत्पाद मैनुअल के भीतर उपकरण नेमप्लेट और प्रदर्शन विनिर्देशों तालिका में विस्तृत किया गया है। महत्वपूर्ण डिजाइन पैरामीटर (आर, एलडी, एलक्यू,, पीएम, के, केटी) आमतौर पर "तकनीकी मापदंडों", "समतुल्य सर्किट पैरामीटर", या मैनुअल के "नियंत्रण पैरामीटर" अनुभागों में प्रदान किए जाते हैं। यदि अनुपलब्ध है, तो निर्माताओं का दस्तावेज़ प्राप्त किया जाना चाहिए। विभिन्न संतृप्ति स्तरों पर इंडक्शन वक्र जैसे विस्तृत मापदंडों को विशेष डिजाइन दस्तावेजों या परीक्षण रिपोर्टों की आवश्यकता हो सकती है।
5। परीक्षण माप :
यदि आधिकारिक मापदंडों को प्राप्त नहीं किया जा सकता है, तो प्रयोगात्मक माप (जैसे ब्लॉक परीक्षण, नो-लोड ड्रैग टेस्ट, एलसीआर मीटर माप, पैरामीटर पहचान एल्गोरिथ्म, आदि) की आवश्यकता होती है। हालांकि, इसके लिए पेशेवर उपकरण और ज्ञान की आवश्यकता होती है।